FANUC机器人ProfiNet做主站通信
一、定义
PROFINET I/O 是基于工业以太网的一种通讯方式,可以作为从站与主站(例如 PLC),作为主站与周边设备(例如焊机)进行实时通讯。其中 FANUC 板卡的 Profinet 通讯中,机器人做从站时可以支持最多 128bytes 的输入/输出(DI/DO、GI/GO、UI/UO),其中信号配置时 Rack 号为 102,Slot 号为 1;机器人做主站时也可以支持最多 128bytes 的输入/输出(DI/DO、GI/GO、AI/AO)。其中信号配置时 Rack 号为 101,Slot 号可以为1-128(即最多从站数目 128)。
二、工作准备
1、 Mini-slot 双通道 Profinet 板卡及通讯线;
2、检查 ORDERFIL.DAT 中添加了 R834-Dual Chan.Profinet(如果需要配置 DCS 中 SafetyI/O,还需有 J931-PROFINET Safety)。注意 R834 与 J930-PROFINET I/O(西门子板卡 Profinet通讯所需软件)不能同时存在;
3、GSD 文件,包括机器人的 GSD 文件(文件名:GSDML-V2.3-Fanuc- A05B2600R834V830-20140601),周围从站的 GSD 文件(机器人做主站时要求),“setuppct”安装软件(机器人做主站时要求)。
三、外部条件
1、机器人与通讯的设备已经安装到位、上电后可以正常工作,同时相互之间通过 Profinet通讯线进行连接;
2、客户方需要安排 PLC 工程师进行配合。
四、主站通讯
Profinet 主站通讯时包括硬件连接和软件设置两个部分,其中硬件连接如下图所示,从站(例如焊机)通过 Profinet 通讯线与板卡 Chain1 的 Port1/Port2 连接。

软件设置包括三个部分:设置机器人侧 Channel1 的参数(包括 Address settings、Switch settings(默认,不更改)),在电脑侧生成、加载 Template library 至机器人,设置机器人侧IO-Controller(增加从站设备到 Configured Device list)。
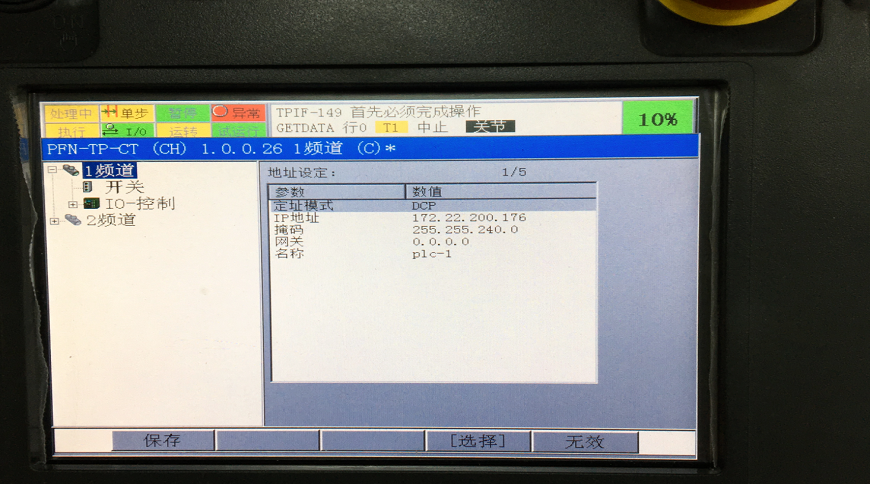
如下图所示,从站通讯成功后,将 Channel 1ENABLE,然后设置机器人侧的 IP 地址、子网网关、名称(和 Channel2 中设置的参数相同)。
在电脑侧安装“PFN-CT”软件。执行 应用程序,安装“PFN-CT-PROFINET Configuration Tool”软件
应用程序,安装“PFN-CT-PROFINET Configuration Tool”软件
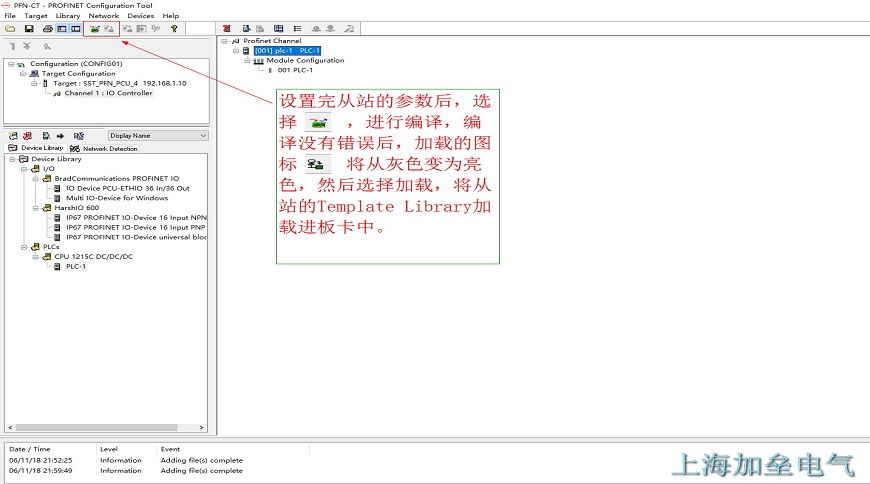
“PFN-CT”软件侧的设置流程 如下图所示。
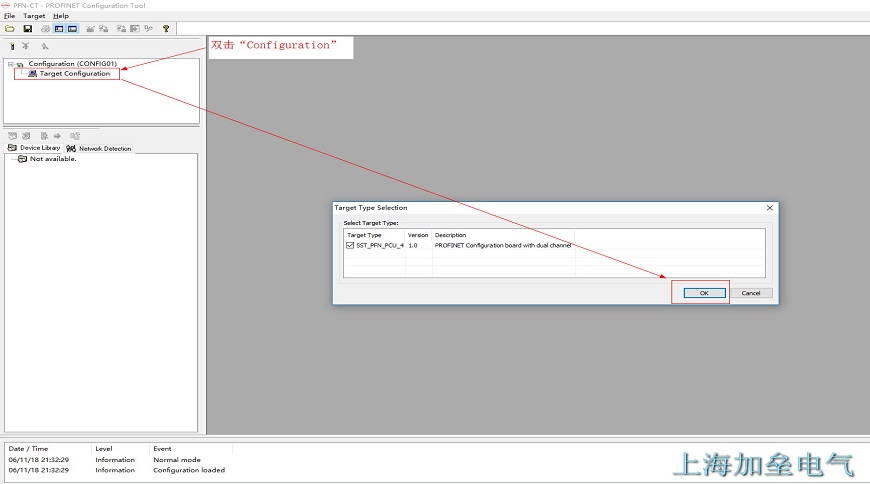
选择“OK”。
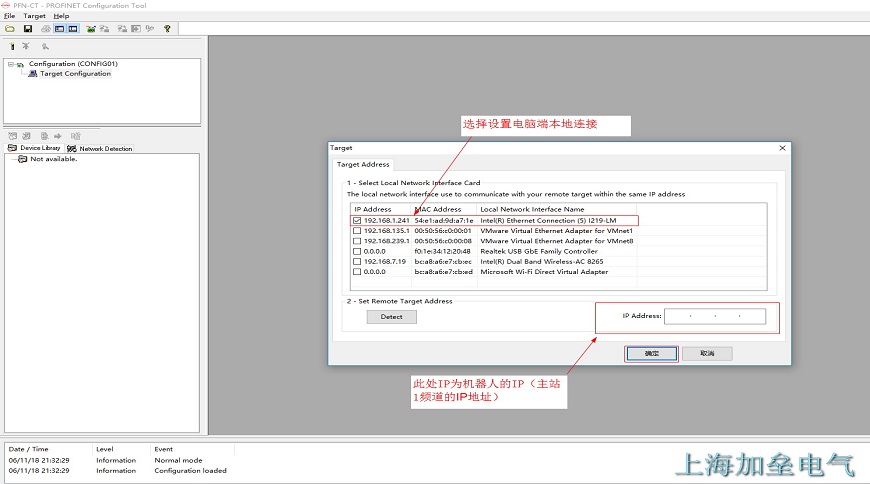
选择IP Address 为所设置的电脑IP 的一项
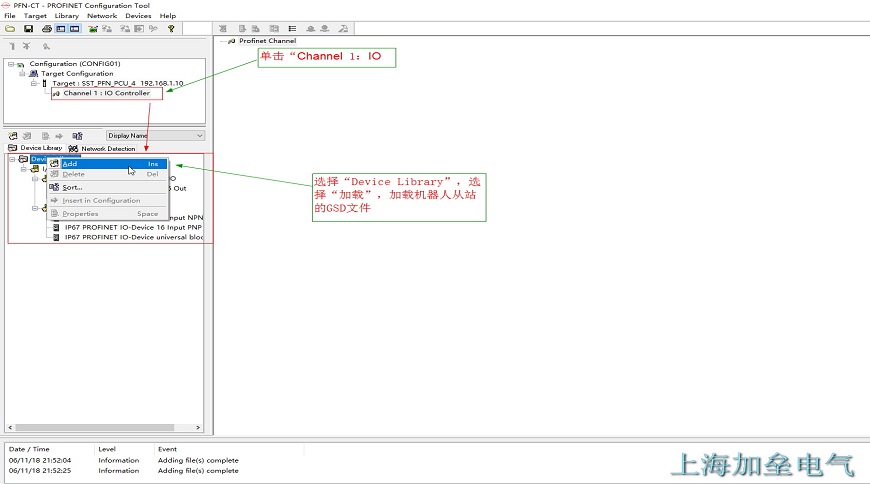
1、选择“Device Library”,选择“Add” ,添加机器人从站的GSD 文件;
2、在“Device Library”中找到需要添加的从站的文件,然后选择“Insert in Configuration” ,将其添加到右边界面“ProfiNet
Channel”中
。
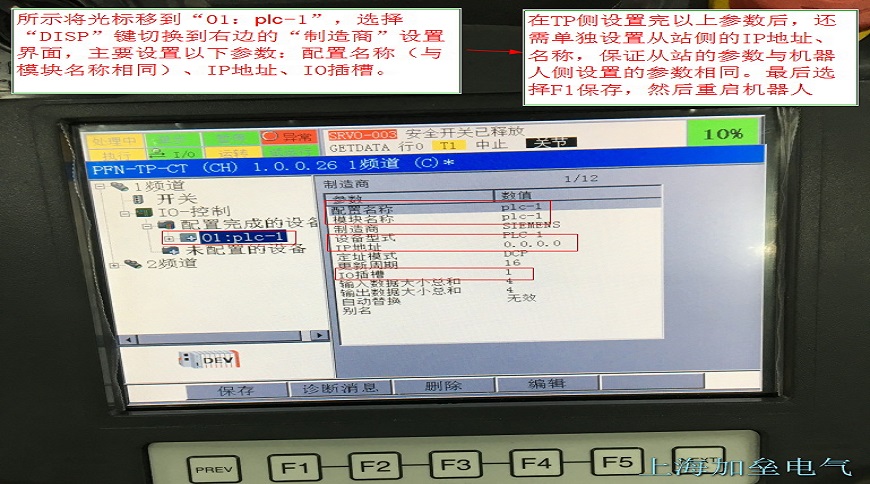
在 TP 侧设置完以上参数后,还需单独设置从站侧的 IP 地址、名称,保证从站的参数与机器人侧设置的参数相同。
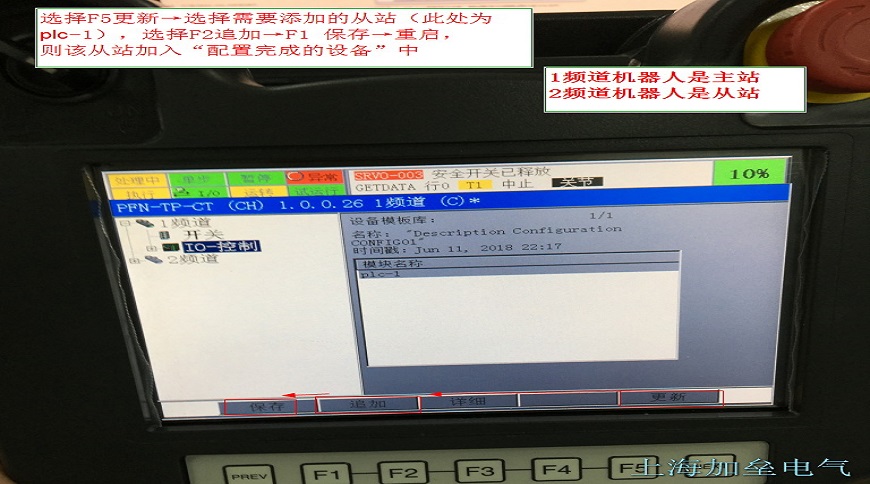
最后选择 F1保存,然后重启机器人,如果“01:plc-1”
图标上出现绿色,则表示通讯成功,如果为红色,则表示通讯不成功,需要检测相关参数的设置,排除问题。
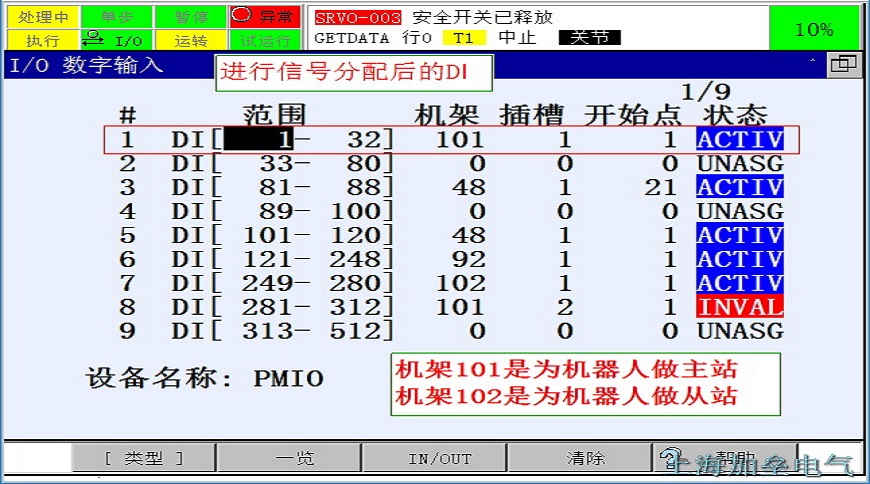
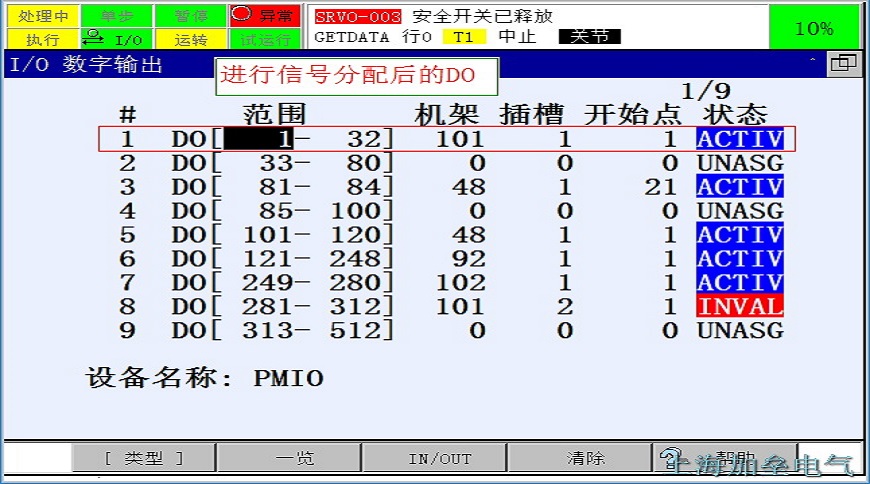
如下图所示为进行信号分配后的 DI/DO。
- 上一篇:ABB机器人设置示教器背景图片 2018/8/1
- 下一篇:ABB机器人设置DI信号检测延迟 2018/7/31